
人に寄り添って家事や医療・福祉を支援スマートロボットでつなぐAIと社会

ロボットが人と協調しながら、家事や接客、医療、福祉など、さまざまな仕事を行う。小説や映画で描かれたそんな世界が、現実のものになりつつある。早稲田大学理工学術院の菅野重樹教授は「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」という目
標を掲げたプロジェクトを先導している。多種多様なタスクを1台で行える「スマートロボット」実現の現在地と展望を聞いた。
※JST広報誌『JSTnews 2024年3月号』に掲載された、目標3の菅野重樹プロジェクトマネージャーの特集記事を転載※

早稲田大学理工学術院学術院長・教授
2020年よりムーンショット型研究開発事業目標3プロジェクトマネージャー
「アトム」で描かれた未来世界 40年以上にわたり脈々と研究
手塚治虫の代表作「鉄腕アトム」で描かれた「ロボットが人に寄り添い、共生していく社会」。未来世界の姿として、誰もが一度は想像したことがあるのではないだろうか。ロボットが人とコミュニケーションをとりながら、家事や接客など、さまざまな仕事を行ってくれる。特に少子高齢化の進行により労働人口が減少し、さらなる人材不足が課題となっている福祉・医療分野においては、人と共に活動し、支援を行ってくれるロボットの実用化に大きな期待が寄せられている。
しかし、現在のロボットを見てみると、自動車などの製造現場のオートメーションのほか、受付や売り場などでの案内、レストランの配膳など、特定の業務や物事を行う機能では大きな進化を遂げてきた一方、1台で異なる複数のタスクをこなすまでには至っていないのが実情だ。また、ロボットが真に「人と触れ合える」ようになるには、素材はもちろん、人に触れたときの力の入れ具合といった動作における「柔らかさ」「繊細さ」も求められる。
これらの課題を解決し、2050年までにビジネスから家事、そして介護、看護、治療を自律的に行うロボットの実現に挑んでいるのが、早稲田大学理工学術院の菅野重樹教授だ。1973年、世界初の二足歩行可能な人間型ロボット「WABOT(ワボット)-1」が開発されたニュースを見て、ロボット研究を志したという。WABOT-1は、日本のロボット研究の創始者とも言える故・加藤一郎教授が早大在籍当時に開発したものだ。「人間に近いロボットを研究する加藤先生の下で学びたいと決意し、早大に進学しました。念願叶い、先生の研究室に入ることができました」と振り返る。
同大学の大学院へ進学した菅野さんは、加藤教授の下で国際科学技術博覧会にも出展した鍵盤楽器演奏ロボット「WABOT-2」開発チームに参加。その後も、世界初の卵を割れるロボットハンドを備えた「WENDY(ウェンディ)」、原始的な知能・感情を持つロボット「WAMOEBA(ワメーバ)」、そして07年には、人間共存ロボット「TWENDYONE(トゥウェンディ-ワン)」と数々のロボットを開発し、世に送り出してきた(図1)。40年以上にわたって、人間と関わるロボットの実現をテーマに研究を脈々と続けてきたことになる。

WENDYは腕部各関節に受動的な柔軟性を搭載し、世界で初めて卵をきれいに割ることに成功したロボットだ(左)。その後開発されたTWENDY-ONEは、受動柔軟性による人や環境への追従機能と人の体を支えられるパワーが強化され、家事や介護現場での活躍が想定されている(右)
1台にあらゆる機能を搭載 カギはコミュニケーション力
そして現在、菅野さんはJSTのムーンショット型研究開発事業の目標3「一人に一台一生寄り添うスマートロボット」のプロジェクトマネージャーとして、新たなロボットの開発に取り組んでいる。この事業は、日本が抱える少子高齢化や地球温暖化、大規模災害といったさまざまな課題解決に向け、国内発の破壊的イノベーションを創出することで、より大胆な発想に基づく挑戦的な研究開発を行うというコンセプトの下、創設されたものだ。「社会」「環境」「経済」の3つの領域において、医療、環境、AIやロボットなど、9つの目標を掲げている。
プロジェクトの究極の目的は、さまざまな現場で自律的に実行可能で、人間に寄り添いながら複数のタスクを行えるロボットの実現だ。例えば、福祉や介護の現場では多種多様な自動化ツールがあり、それを機能ごとにロボット化していくという手段も考えられる。「しかし、そうしたアプローチでは、ロボットの数がものすごく増えてしまうことになります」とロボット社会に向けた問題を語る。
現在、菅野さんが開発に取り組んでいるのは「AIREC(アイレック:AI-driven Robot for Embrace and Care)」というロボットである。これは、スマートフォンと同じように1台にあらゆる機能が備わった「スマートロボット」と言えるだろう。菅野さんは、21世紀に入りAIや制御機構が大きく進化している現状を前向きに捉えている。「これまでの技術と新たに開発したハードウェアを結びつけることで、これまでにないロボットを開発できると考えています。プロジェクトでは、単なる既存のバージョンアップに留まらない、全く新しいロボットの世界へとたどり着くことを目指しています」。
菅野さんはスマートロボットの実現に向け、AIによる高い環境適応性を実現するソフトロボティクスと人を含む実空間に柔軟に働きかける身体知と相互誘導型コミュニケーション知能の開発に取り組んでいる。また、実施体制として、研究開発項目ごとに、①スマートロボットの身体と制御システムの構築②スマートロボットの知能システムの構築③スマートロボットの福祉・医療への展開技術の構築④スマートロボットの実用化方策の4つを定めている(図2)。

「硬い・重い」を「柔らかく」 安全で自己修復機能も備える
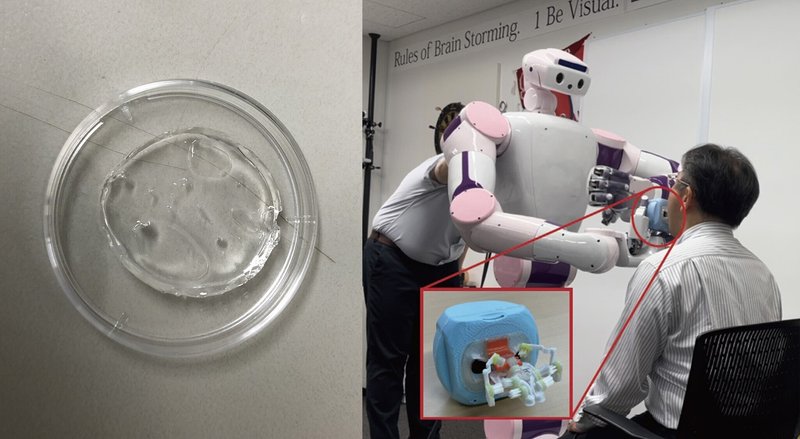
スマートロボットの実現に向けた目標の1つが、これまでの「硬い」「重い」ロボットを安全な「柔らかい」ものへと進化させることだ。現在のロボットは耐久性などの観点から、表面や内部の制御機構に金属や強化プラスチックが用いられているが、硬いロボットでは人と密に触れ合う場面において危険な時がある。加えて人と触れ合うためには、状況に応じて力を加減できることも重要だ。そうした柔らかいロボットを実現するための取り組みの1つが、人の生体を模した新しい「ドライ・ウェットハイブリッドスマートロボット」の開発である(図3)。

骨格や関節の部材・構造を工夫し、連結部品間の隙間がない安全なロボットを目指している(左)。直近では、動力エネルギーをロボットのハンド動作に変換するアクチュエーターとなる磁気粘弾性流体ベーンモーターと冷却や自己修復を目的とした循環系との組み合わせ(右上)や、信頼性向上や伸縮時の出力安定化を見据えた皮膚センサー(右下)の開発も進行中だ
ドライとは従来のロボットのような、体や内部の制御機構が硬質な素材で組み上げられたものを指す。対して、ウェットとは人間や動物のような生体の「柔らかさ」を備える材質を示す。表皮や関節、筋肉などに該当するロボットの機構を、化学系・流体系ベースに移行させることで、柔らかさを実現する。また、油剤や冷却剤、潤滑剤といった体液を体に循環させることにより、人間や動物のような「自己修復機能」も備えることが特長だ。
このドライとウェットの長所、すなわち従来の機械の強みと生体の強みを兼ね備えたものが、ドライ・ウェットハイブリッドスマートロボットである。例えば、人間の骨に該当する部位を金属素材で作れば、強い衝撃を受けてもほぼ折れない。「一方、生体のような循環系を持つので、不具合が生じた場合でも修復材を自身で供給するなど、自己修復が可能です」と菅野さんは説明する。このロボットの実現に向け、現在では、ロボットハンドのアクチュエーターに磁気粘弾性流体を取り入れた油圧モーターや自己修復用カプセルといった要素技術の開発を進めている。
「深層予測学習」を発展 現実との誤差を最小に
菅野さんらは、家事を支援するロボット知能を構築するために「深層予測学習」を発展させた。従来の機械学習では、大量のデータを用いて最適な予測モデルを構築し、ロボットが多様なタスクを行えるようにしてきた。しかし、現実的にはロボットが想定外の事象に遭遇する場面が多々あり、その全てに対応できる予測モデルを構築するのは困難である。「一方、深層予測学習は、視覚や触覚情報に基づいて予測し、現実との誤差を最小とするように次の動作を指令します。これにより、ロボットはタスクの内容や周囲の環境が変化しても柔軟に対応できます」と説明する。
現在はプロジェクトで開発した人共存型ドライロボット「Dry-AIREC」を基に、人間の手作業、特に家事を支援するロボット知能の実現に取り組んでいる(図4)。ロボットハンドの両腕を協調させることで、すでに洗濯物を干したり、衣類を畳んだりするといった家事タスクも実現している(図5)。しかし、衣類でも肌触りが異なる絹やウールの扱いは難しい。また、多種多様な食材を使ったさまざまな調理スキルの獲得、ゴミ処理や床拭きといった環境に適応した掃除法など、家事作業だけでも難しい課題は膨大であり、何でもできるロボットの実現は容易ではない。

プロジェクトにおける学習や人のスキル獲得の研究開発のため開発されたDry-AIRECは、東京ロボティクス社(東京文京区)にハードウェアを特注。各関節には高分解能のトルクセンサーを内蔵、表面には人肌ゲル素材が用いられている(左)。動き自体も柔らかく、人が外から動かしてもきれいに追随できる、世界最高水準の人共存型ドライロボットだ(右)

独ミュンヘン工科大学と共同で、深層予測学習と注意機構を用いた双腕協調による洗濯物ハンドリング実験を行っている。干し方や位置が異なる洗濯物を認識し、腕の曲げ伸ばしや洗濯物をつかむ・持ち上げるなどの動作を実行する
医療や介護の現場で、人を支援して作業を行うスマートロボットを実装するにあたり、人に決して危害を与えないよう、安全かつ優しく動作するようにしなければならない。そこで、人に寄り添いながら支えることを可能とする「バイオハイブリッド型ロボットスキン」の開発をはじめ、触診や手当などの診察を行える専用のロボットハンドの開発に向けた取り組みも進めている。これらの技術開発のほか、人間に物理的に触れる作業が行えるロボットシステムの構築に向けたさまざまな動作実験も実施されている(図6)。
人の手に代わるロボットハンドスキンの実現に向けて、弾性や接着力、高い伸展性や自己修復性を持つゲル材料(左)の開発や、口腔ケアを想定したシナリオ作成と実機テストの実施(右)など、医療・介護現場での実際の使用を見据えた実証実験が展開されている
「身体知の実現」が重要課題 ソフトとハードの統合不可欠
これまで説明してきた項目以外にも、ムーンショット型研究開発事業ではAI、ミドルウェア、ハードウェアの領域において、さまざまな研究開発が進行中だ。理想のスマートロボットを実現するためには、まだまだ解決すべき課題は山積みだと菅野さんは指摘する。他分野の研究と異なり、ロボットは1つイノベーションがあれば、一足飛びに次のステージに上がれるわけではないからだ。菅野さんは重要な課題の1つに「身体知の実現」を挙げる。身体知とは、自転車をこぐなど、無意識に自分の体の特徴を生かした動きができる知能のことで、従来のAIでは扱いにくい対象とされてきた。「私はAIをソフトウェアから『ソフトウェア+ハードウェア』として変革させていかなければならないと考えています。そうしたAIの革新や新たなスキルを獲得するためには、ハードウェアも進化していく必要があります」。また、スマートロボットを実現するためには、単に新技術を開発すれば良いのではなく、それらを最適に組み合わせる「インテグレーション(統合)」も不可欠だという。「インテグレーションによって組み合わせられたものができても、そこで次の課題が明らかになり、その改善に向け次のインテグレーションに取り組んでいかなければなりません。スマートロボットの開発はこの繰り返しなのです」。菅野さんの強い意思の下には、プロジェクトの参画研究者はもちろんのこと、多くの学生たちも集う。立ちふさがる課題を1つ1つ解決しながら、スマートロボットの社会実装への道を着実に開こうとしている。
(TEXT:佐宗秀海、PHOTO:伊藤彰浩)
関連情報
